
2.4 Inverse Kinematics
2.4.1 Inverse Kinematics
이제부터는 반대로 end-effector pose가 Cartesian space에 주어질 때, 이를 실현시킬 수 있는 $N$개의 joint angle을 찾는 문제를 풀자.
\[\textbf{x} = \begin{bmatrix} x & y & z & \theta_r & \theta_p & \theta_y \end{bmatrix}^T \\ \boldsymbol{\theta} = \begin{bmatrix} \theta_1 & \theta_2 & \theta_3 & \cdots & \theta_N \end{bmatrix}^T\]Forward kinematics의 경우는 다음과 같은 equation을 풀어야 했다.
\[\textbf{x} = \textbf{K}(\boldsymbol{\theta}) = \textbf{T}_E\]반대로 inverse kinematics는 $\textbf{T}_E$와 $\textbf{x}$가 주어져 있을 때,
\[\boldsymbol{\theta} = \textbf{K}^{-1}(\textbf{x}) \in \mathbb{R}^N\]를 구하는 문제가 된다.
다시 말해, homogeneous transform이 주어져 있다.
\[\textbf{T}_E = \begin{bmatrix} \textbf{R}_E & \textbf{p}_E \\ 0 & 1 \end{bmatrix}\]이제 다음을 만족하는 해 $\theta_1, \theta_2, \cdots, \theta_N$을 찾아라!
\[\textbf{T}_E = {}^{0}\textbf{T}_1(\theta_1){}^{1}\textbf{T}_2(\theta_2) \cdots {}^{N-1}\textbf{T}_N(\theta_N){}^{N}\textbf{T}_E(\bullet)\]Method of Solutions
Inverse kinematics를 해결하는 일반적인 방법은 없다.
(1) Closed form solution : algebraic expression과 같은 non-iterative solution.
- Geometric
- algebraic
(2) Numerical solution : iterative, numerical.
- 계산에 많은 노력이 필요하고 오래 걸린다.
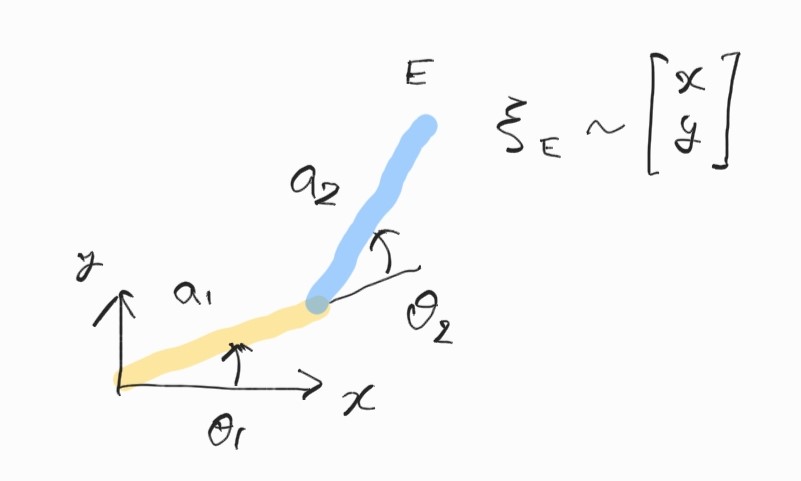
2.4.1 2 DOF Planar Manipulator
Geometric Approach
먼저 해의 존재성을 생각하자.
Worskpace란 간단히 말해서 manipulator의 end-effector가 도달할 수 있는 space의 volume을 의미한다.
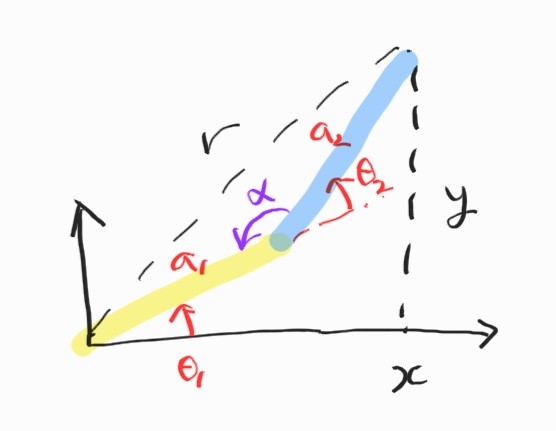
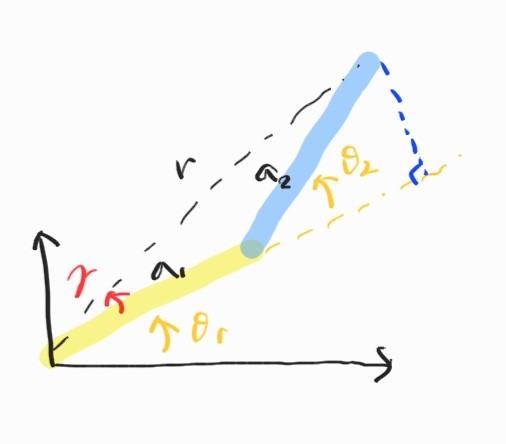
위 그림에 해당하는 위치에 end-effector가 도달할 수 있으려면, 즉 해가 존재하려면 다음 식을 만족해야 한다.
\[(a_1 - a_2)^2 \leq x^2 + y^2 \leq (a_1 + a_2)^2 \\ \\ \textrm{or} \\ \\ \vert a_1 - a_2 \vert \leq \Vert \textbf{P}_E \Vert \leq a_1 + a_2\]여기서 $\textbf{P}_E = \begin{bmatrix} x & y \end{bmatrix}^T$.
이제 기하학적인 지식을 동원해 해를 구하자. 먼저 제2코사인법칙.
\[\begin{align*} r^2 &= x^2 + y^2 \\ &= a_1^2 + a_2^2 - 2a_1a_2 \cos \alpha \end{align*}\]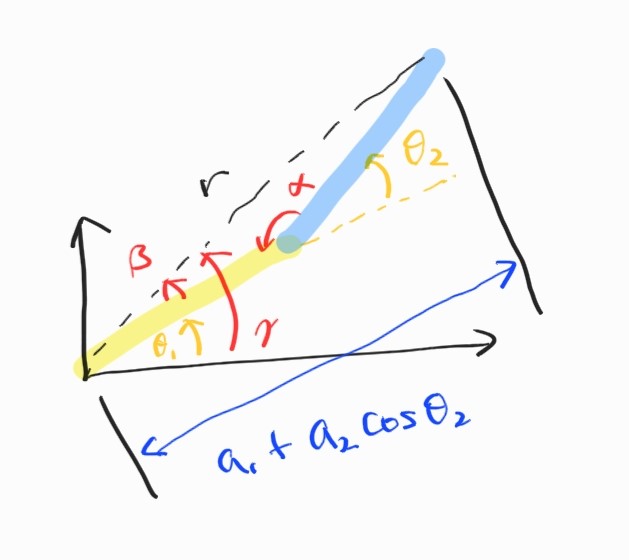
이것으로 두 joint angle을 모두 구할 수 있었다.
그런데, 한 가지 해가 더 존재한다. elbow가 위쪽에 있을 경우.
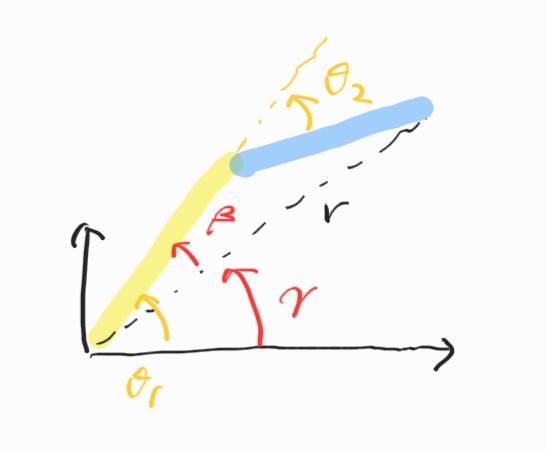
그러므로 2개의 해가 존재한다.
Algebraic Approach
Homogeneous matrix를 계산하면,
\[\textbf{T}_E = \begin{bmatrix} \cos(\theta_1 + \theta_2) & -\sin(\theta_1 + \theta_2) & a_1 \cos \theta_1 + a_2 \cos (\theta_1 + \theta_2) \\ \sin(\theta_1 + \theta_2) & \cos(\theta_1 + \theta_2) & a_1 \sin \theta_1 + a_2 \sin (\theta_1 + \theta_2) \\ 0 & 0 & 1 \end{bmatrix}\]그러므로,
\[x = a_1 \cos \theta_1 + a_2 \cos (\theta_1 + \theta_2) = (a_1 + a_2c_2)c_1 - a_2s_2s_1 \\ y = a_1 \sin \theta_1 + a_2 \sin (\theta_1 + \theta_2) = (a_1 + a_2c_2)s_1 + a_2s_2c_1\]풀기 쉽게 정리하자.
이제 joint angle을 구하면
\[\cos (\gamma + \theta_1) = \frac{x}{r} \\ \sin (\gamma + \theta_1) = \frac{y}{r}\] \[\gamma + \theta_1 = \tan^{-1} \frac{y}{x}\] \[\theta_1 = \tan^{-1}\frac{y}{x} - \tan^{-1}\frac{a_2s_2}{a_1+a_2c_2}\]$\theta_2$는 제2코사인법칙으로.
2.4.2 Solvability
모든 solution들의 set이 결정될 수 있다면, manipulator가 solvable하다고 한다.
Kinematics의 중요한 결과 중 하나는, revolute joint와 prismatic joint가 하나의 chain으로 이루어진 6 DOF system은 모두 solvable하다는 것.
다만 그 해는 numerical. 6 DOF manipulator 중에서도 특별한 case들만이 analytic하게 풀 수 있다.
Analytic solution을 구하는 방법을 요약하면 다음과 같다.
(1) DH paremeter를 이용해 로봇을 modeling.
(2) Forward kinematic equation을 작성.
(3) 12개 equation으로부터 unknown joint variable을 유도한다.
(4) Multiple configuration을 다룬다.
2.4.3 Pieper’s Solution
Pieper는 6 DOF manipulator 중에서 세 연속된 축이 한 점에서 교차하는 경우를 연구했다. 여기서는 마지막 세 revolute joint가 교차하는 case를 알아본다.
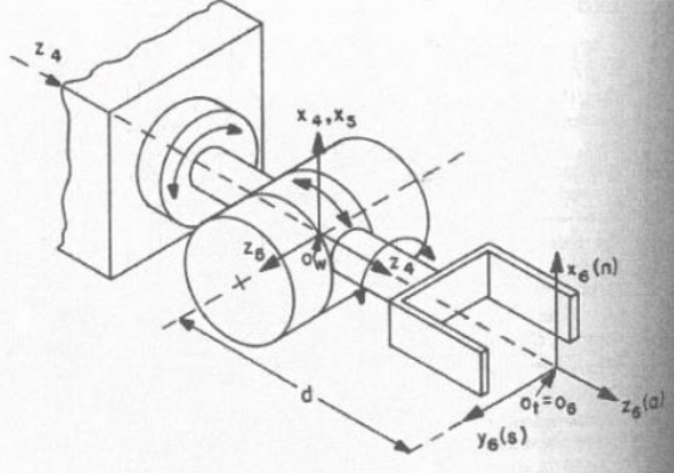
Link frame $\{4 \}$, $\{5 \}$, $\{6 \}$이 한 점에서 교차한다고 하자. 이 점은 base coordinate에서
\[{}^{0}\textbf{P}_{4ORG} = {}^{0}\textbf{T}_1{}^{1}\textbf{T}_2{}^{2}\textbf{T}_3{}^{3}\textbf{P}_{4ORG} = \begin{bmatrix} x \\ y \\ z \\ 1 \end{bmatrix}\]로 표현된다. ${}^{i-1}\textbf{T}_i$의 일반적인 형태를 떠올려보자. 2.2.3의 Craig’s convention을 따르면,
\[{}^{0}\textbf{P}_{4ORG} = {}^{0}\textbf{T}_1{}^{1}\textbf{T}_2{}^{2}\textbf{T}_3 \begin{bmatrix} a_3 \\ -d_4 \sin \alpha_3 \\ d_4 \cos \alpha_3 \\ 1 \end{bmatrix}\]또는,
\[{}^{0}\textbf{P}_{4ORG} = {}^{0}\textbf{T}_1{}^{1}\textbf{T}_2 \begin{bmatrix} f_1(\theta_3) \\ f_2(\theta_3) \\ f_3(\theta_3) \\ 1 \end{bmatrix}, \qquad \begin{bmatrix} f_1 \\ f_2 \\ f_3 \\ 1 \end{bmatrix} = {}^{2}\textbf{T}_3 \begin{bmatrix} a_3 \\ -d_4 s \alpha_3 \\ d_4 c \alpha_3 \\ 1 \end{bmatrix}\]${}^{2}\textbf{T}_3$ 역시 DH parameter로 계산 가능하므로,
\[\begin{align*} f_1 &= a_3c_3 + d_4s\alpha_3s_3 + a_2 \\ f_2 &= a_3c\alpha_2s_3 - d_4s\alpha_3c\alpha_2c_3 - d_4s\alpha_2c\alpha_3 - d_3s\alpha_2 \\ f_3 &= a_3s\alpha_2s_3 - d_4s\alpha_3s\alpha_2c_3 + d_4c\alpha_2c\alpha_3 + d_3c\alpha_2 \\ \end{align*}\]마찬가지로 ${}^{0}\textbf{T}_1$, ${}^{0}\textbf{T}_2$를 계산하고…
\[{}^{0}\textbf{P}_{4ORG} = \begin{bmatrix} c_1g_1-s_1g_2 \\ s_1g_1+c_1g_2 \\ g_3 \\ 1 \end{bmatrix}\] \[\begin{align*} g_1 &= c_2f_1 - s_2f_2 + a_1 \\ g_2 &= s_2c\alpha_1f_1 + c_2c\alpha_1f_2 - s\alpha_1f_3 - d_2s\alpha_1 \\ g_3 &= s_2s\alpha_1f_1 + c_2s\alpha_1f_2 + c\alpha_1f_3 + d_2c\alpha_1 \\ \end{align*}\]이제 ${}^{0}\textbf{P}_{4ORG}$의 크기 제곱을 $r=x^2+y^2+z^2$라고 하면 위 식에 의해,
\[r=g_1^2+g_2^2+g_3^2\]이고,
\[r=f_1^2+f_2^2+f_3^2 + a_1^2+d_2^2+2d_2f_3 + 2a_1(c_2f_1 - s_2f_2)\]이 식에는 더이상 $\theta_1$가 남아있지 않다.
2.4.4 Inverse Kinematics for PUMA 560
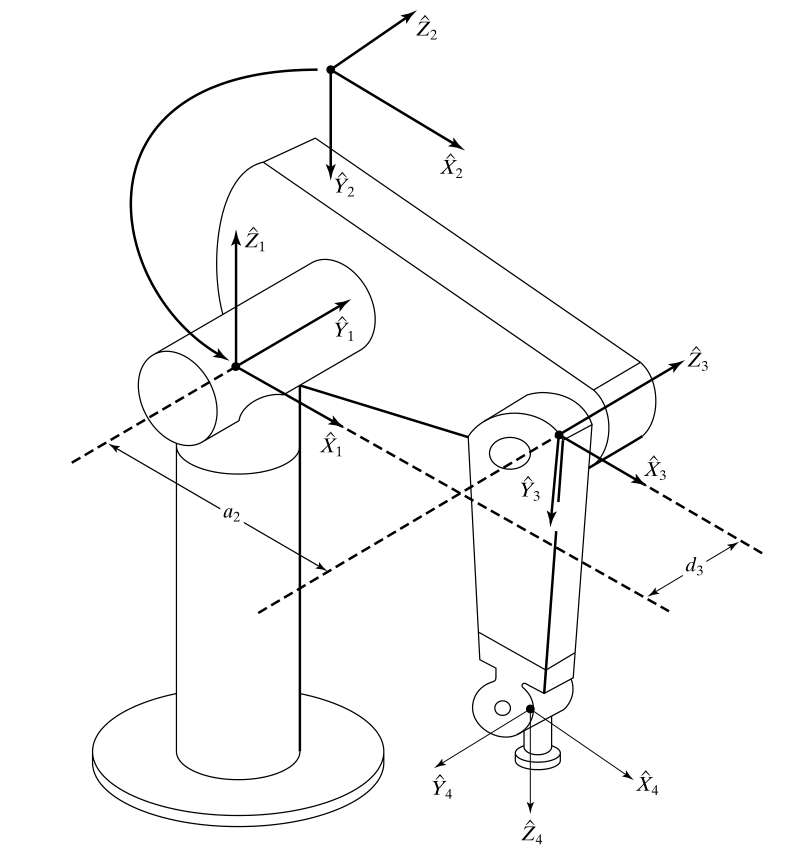
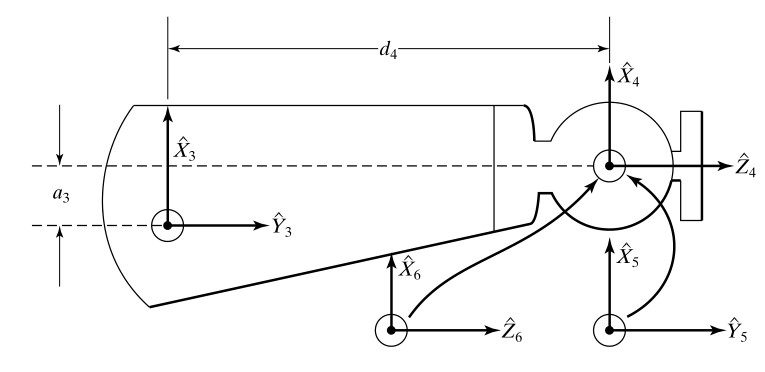
6개의 revolute joint를 갖는 puma 560 로봇. 마지막 세 joint는 한 점에서 만난다.
DH parameter는 Craig’s convention을 사용했다.
| $i$ | $\alpha_{i-1}$ | $a_{i-1}$ | $d_u$ | $\theta_j$ |
|---|---|---|---|---|
| 1 | 0 | 0 | 0 | $\theta_1$ |
| 2 | -90 | 0 | 0 | $\theta_2$ |
| 3 | 0 | $a_2$ | $d_3$ | $\theta_3$ |
| 4 | -90 | $a_3$ | $d_4$ | $\theta_4$ |
| 5 | 90 | 0 | 0 | $\theta_5$ |
| 6 | 90 | 0 | 0 | $\theta_6$ |
Transformation matrix 계산은 여차저차…
(1) Tool position ${}^{0}\textbf{T}_6$를 구한다. DH parameter를 사용.
(2) Forward kinematics ${}^{0}\textbf{T}_6(\theta_1, \theta_2, \theta_3)$와 rotation kinematics ${}^{3}\textbf{R}_6(\theta_4, \theta_5, \theta_6)$을 푼다.
(3) ${}^{0}\textbf{T}_6$의 마지막 column으로부터 wrist center의 위치 $\textbf{P}_c$를 찾는다.
(4) $\textbf{P}_c$는 ${}^{0}\textbf{T}_3(\theta_1, \theta_2, \theta_3)$의 마지막 column이기도 하므로 이로부터 $\theta_1, \theta_2, \theta_3$를 구한다.
(5) $\theta_1, \theta_2, \theta_3$를 대입하여 ${}^{3}\textbf{R}_6 = {}^{0}\textbf{R}_3^{-1}{}^{0}\textbf{R}_6$를 구한다.
(6) ${}^{3}\textbf{R}_6 = {}^{3}\textbf{R}_6(\theta_4, \theta_5, \theta_6)$이므로 이로부터 $\theta_4, \theta_5, \theta_6$를 구한다.
Step 1
3D space 상에서 wrist의 pose가 주어져 있다고 하자.
Step 2
Wrist pose의 함수로써 표현되는 joint angle을 찾자.
Step 3
Kinematics equation의 양변에 transformation matrix의 inverse를 곱하여 찾고자 하는 변수를 분리해낸다.
예를 들면 좌변의 $[{}^{0}\textbf{T}_1(\theta_1)]^{-1}$는 $\theta_1$에 대한 함수이며 ${}^{0}\textbf{T}_6$는 주어져 있다. 여기서 $\theta_1$과 $\theta_3$를 분리하여 계산할 수 있다.
\[[{}^{0}\textbf{T}_3(\theta_1, \theta_2, \theta_3)]^{-1}{}^{0}\textbf{T}_6 = [{}^{0}\textbf{T}_3(\theta_1, \theta_2, \theta_3)]^{-1}{}^{0}\textbf{T}_1{}^{1}\textbf{T}_2{}^{2}\textbf{T}_3{}^{3}\textbf{T}_4{}^{4}\textbf{T}_5{}^{5}\textbf{T}_6\]그 다음은 $\theta_2$와 $\theta_4$를 따로 계산. 마지막으로,
\[[{}^{0}\textbf{T}_4(\theta_1, \theta_2, \theta_3, \theta_4)]^{-1}{}^{0}\textbf{T}_6 = [{}^{0}\textbf{T}_4(\theta_1, \theta_2, \theta_3, \theta_4)]^{-1}{}^{0}\textbf{T}_1{}^{1}\textbf{T}_2{}^{2}\textbf{T}_3{}^{3}\textbf{T}_4{}^{4}\textbf{T}_5{}^{5}\textbf{T}_6\] \[[{}^{0}\textbf{T}_5(\theta_1, \theta_2, \theta_3, \theta_4, \theta_5)]^{-1}{}^{0}\textbf{T}_6 = [{}^{0}\textbf{T}_5(\theta_1, \theta_2, \theta_3, \theta_4, \theta_5)]^{-1}{}^{0}\textbf{T}_1{}^{1}\textbf{T}_2{}^{2}\textbf{T}_3{}^{3}\textbf{T}_4{}^{4}\textbf{T}_5{}^{5}\textbf{T}_6\]이렇게 $\theta_5$와 $\theta_6$까지 계산하면 끝. 여기까지가 전체적인 계산 절차이다.
Step 4
${}^{0}\textbf{T}_1$의 inverse를 구하는 것은 간단하다.
이므로,
\[{}^{0}\textbf{T}_1 = \begin{bmatrix} c_1 & -s_1 & 0 & 0 \\ s_1 & c_1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix} \qquad [{}^{0}\textbf{T}_1]^{-1} = \begin{bmatrix} c_1 & s_1 & 0 & 0 \\ -s_1 & c_1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}\]이 행렬을 양변에 곱하게 되면,
\[\begin{bmatrix} c_1 & s_1 & 0 & 0 \\ -s_1 & c_1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} r_{11} & r_{12} & r_{13} & p_x \\ r_{21} & r_{22} & r_{23} & p_y \\ r_{31} & r_{32} & r_{33} & p_z \\ 0 & 0 & 0 & 1 \end{bmatrix} = {}^{1}\textbf{T}_6\]Step 5
위 식을 계산해야 한다. 먼저 DH parameter로 얻은 transformation matrix를 어찌저찌 계산하면…
휴.
$(2,4)$ 성분을 계산하자. 즉 첫 번째 행렬의 2행과 두 번째 행렬의 4열을 곱하면,
\[-s_1p_x + c_1p_y = d_3\]Trigonometric substitution을 통해,
\[p_x = \rho \cos \phi \\ p_x = \rho \sin \phi \\ \phi = \textrm{atan2}(p_y, p_x)\] \[c_1s_{\phi} - s_1c_{\phi} = \frac{d_3}{\rho} \\ \sin(\phi - \theta_1) = \frac{d_3}{\rho}\] \[\cos(\phi - \theta_1) = \pm \sqrt{1-\left( \frac{d_3}{\rho}\right)^2} \\ \phi - \theta_1 = \textrm{atan2}\left( \frac{d_3}{\rho}, \pm \sqrt{1-\left( \frac{d_3}{\rho}\right)^2} \right)\]따라서 $\theta_1$을 구할 수 있게 되었다.
\[\theta_1 = \textrm{atan2}(p_y, p_x) - \textrm{atan2}\left( \frac{d_3}{\rho}, \pm \sqrt{1-\left( \frac{d_3}{\rho}\right)^2} \right)\]이를 만족하는 해는 2개.
Step 6~
자, 이런 식으로 다른 성분들도 계산하고… 아무튼 해를 구할 수 있으니 생략. 사람이 할 일이 아니다.
-
여기서 $\textbf{T}_E$는 12개 equation. ↩