
2.3 Actuator Space/Joint Space/Task Space
2.3.1 World & Tool Coordinate
지금까지 배운 것으로 우리는 $\{0 \}$ coordinate부터 end effector $\{E \}$ coordinate까지의 forward kinematics를 해결할 수 있게 되었다.
\[{}^{0}\mathbf{T}_1(\theta_1) {}^{1}\mathbf{T}_2(\theta_2){}{}^{2}\mathbf{T}_3(\theta_3) \cdots {}^{N-1}\mathbf{T}_N(\theta_N)\]그런데 실제 로봇에는 두 가지 좌표계의 pose를 더 알아야 할 필요가 있다.
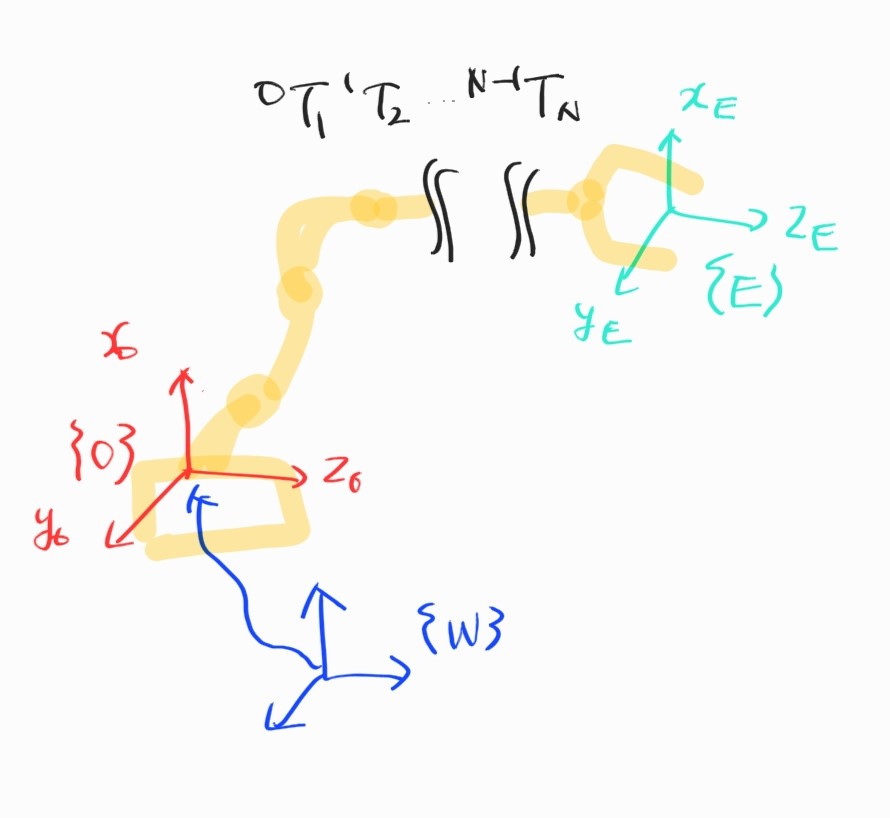
World coordinate frame $\{W \}$와 마지막 frame에 부착되는 tool 또는 gripper의 frame $\{E \}$이다. 이 두 frame 사이의 관계를 알아야 한다.
일반적으로 robot과 world 사이에 moving joint가 없으면 $\{W \}$와 $\{0 \}$ 사이의 transformation은 constant로 나타난다. End effector 역시 그렇게 부착되어 있다고 한다면,
\[{}^{W}\mathbf{P}_E = {}^{W}\mathbf{T}_0(\bullet){}^{0}\mathbf{T}_1(\theta_1){}^{1}\mathbf{T}_2(\theta_2){}^{2}\mathbf{T}_3(\theta_3) \cdots {}^{N-1}\mathbf{T}_N(\theta_N){}^{N}\mathbf{T}_E(\bullet){}^{E}\mathbf{P}\]이렇게 end effector의 position을 world coordinate에서 표현할 수 있게 되었다.
Robot manipulator의 아래 부분에는 motor와 같은 actuator가 부착되어 있다. Motor는 joint에 부착되어 rotating/sliding mechanism을 일으킨다. Joint를 움직임으로써 task가 가능해진다.
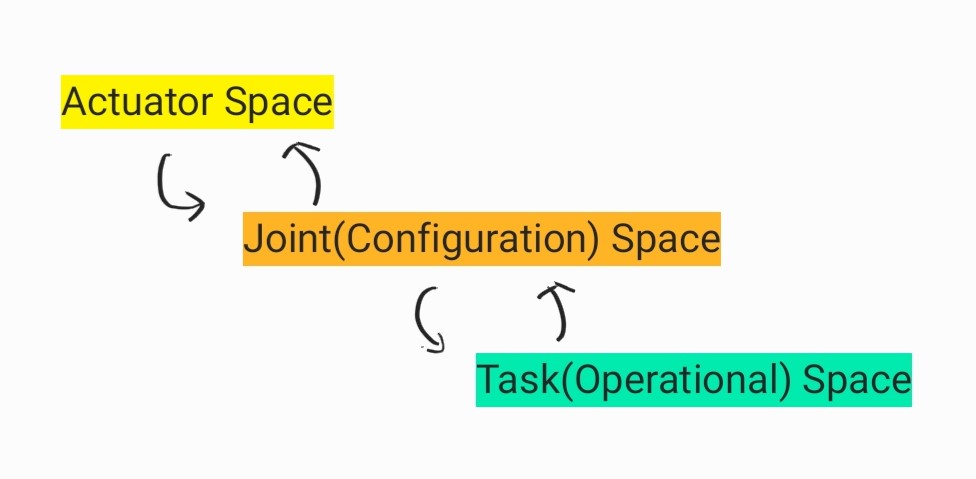
따라서 actuator space, joint space, task space 사이에는 일대일 대응 관계가 있다.
2.3.2 Joint Space
$n$ DOF의 manipulator의 모든 link의 position은 $n$개의 joint variable로 표현된다. 이 joint variable의 set을 $n \times 1$ joint vector(또는 joint coordinate)로 나타낼 수 있다.
이러한 joint vector들의 space를 joint space 또는 configuration space라고 한다.
Joint vector의 각 성분은 각도(revolute joint) 또는 길이(prismatic joint)이다.
Configuration space $\mathcal{C} \subset \mathbb{R}^N$는 모든 가능한 configuration $\mathbf{q}$의 space.
\[\mathbf{q} = \{q_j \ |\ j \in [1 \cdots N] \} \in \mathcal{C}\]2.3.3 Task Space
모든 가능한 end-effector pose들의 space를 task space라고 한다.
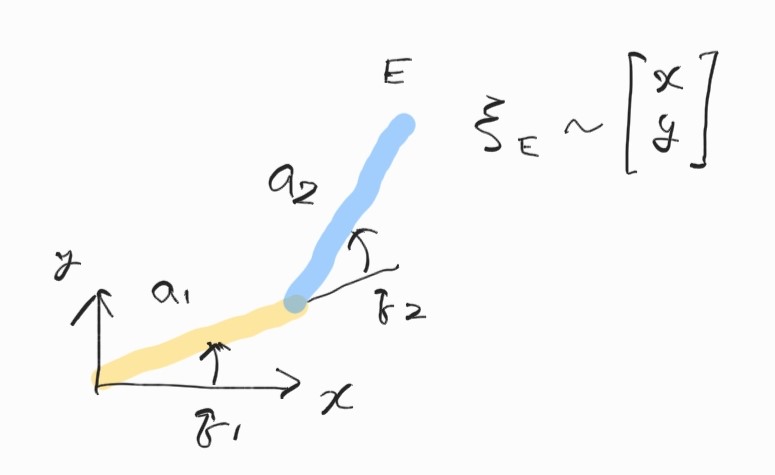
\[\xi_{E} \in \mathcal{T}\]2D 상에서 $\mathcal{T} \subset SE(2)$.
\[\begin{align*} \xi_{E} &\sim \begin{bmatrix} x & y \end{bmatrix}^T \\ \xi_{E} &\sim \begin{bmatrix} x & y & \theta \end{bmatrix}^T \\ \end{align*}\]3D 상에서 $\mathcal{T} \subset SE(3)$.
\[\begin{align*} \xi_{E} &\sim \begin{bmatrix} x & y & z \end{bmatrix}^T \\ \xi_{E} &\sim \begin{bmatrix} x & y & z & \theta_p \end{bmatrix}^T \\ \xi_{E} &\sim \begin{bmatrix} x & y & z & \theta_r & \theta_p & \theta_y \end{bmatrix}^T \\ \end{align*}\]2.3.4 Dimensions
Robot의 degree of freedom(joint의 개수)는 $\textrm{dim} \ \mathcal{C}$로 정의한다.
또, task space degree of freedom은 $\textrm{dim} \ \mathcal{T}$로 정의된다.
Task space의 모든 원소에 도달할 수 있으려면 다음 조건을 만족해야 한다.
\[\textrm{dim} \ \mathcal{C} \geq \textrm{dim} \ \mathcal{T}\]2 DOF Planar Manipulator
3 DOF Planar Manipulator
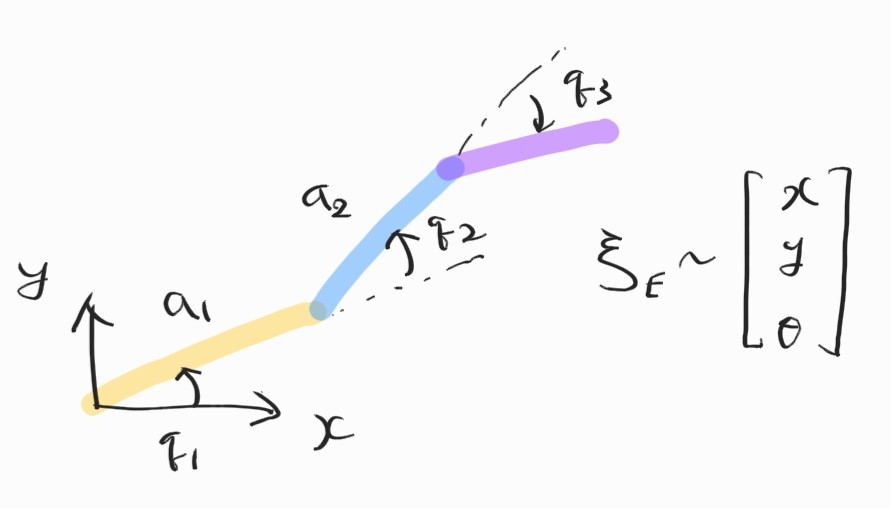
여기서는 task space가 두 position과 하나의 orientation으로 이루어져 있다.