
1.6 Three Types of Rotation Representation
지금까지 rotation representation의 세 종류를 알아보았다.
- Rotation matrix
- Euler angle
- Quaternion
이들 사이에 어떤 관련이 있을까?
1.6.1 Quaternion vs Rotation Matrix
Quaternion $q = (q_0, \textbf{q})$으로 주어진 rotation matrix는
\[\textbf{R} = \begin{bmatrix} 1-2(q_2^2 + q_3^2) & 2(q_1q_2 - q_0q_3) & 2(q_0q_2 + q_1q_3) \\ 2(q_0q_3 + q_1q_2) & 1-2(q_1^2 + q_3^2) & 2(q_2q_3 - q_0q_1) \\ 2(q_1q_3 - q_0q_2) & 2(q_0q_1 + q_2q_3) & 1-2(q_1^2 + q_2^2) \\ \end{bmatrix}\]이로부터 역산하면
\[q = \begin{bmatrix} \frac{1}{2} \sqrt{1+r_{11} + r_{22} + r_{33}} \\ \frac{1}{4q_0} (r_{32}-r_{23}) \\ \frac{1}{4q_0} (r_{13}-r_{31}) \\ \frac{1}{4q_0} (r_{21}-r_{12}) \\ \end{bmatrix}\]또는,
\[q = \begin{bmatrix} \frac{1}{2} \sqrt{1+r_{11} + r_{22} + r_{33}} \\ \frac{1}{2} \textrm{sgn}(r_{32}-r_{23}) \sqrt{r_{11} - r_{22} - r_{33} +1}\\ \frac{1}{2} \textrm{sgn}(r_{13}-r_{31}) \sqrt{r_{22} - r_{33} - r_{11} +1}\\ \frac{1}{2} \textrm{sgn}(r_{21}-r_{12}) \sqrt{r_{33} - r_{11} - r_{22} +1}\\ \end{bmatrix}\]가 된다.1
이때, $r_{ij}$는 $\textbf{R}$의 $i$행 $j$열 성분.
Composition of Rotations
Quaternion의 product 이용.
\[{}^aq_c = {}^aq_b {}^bq_c\]Example 1
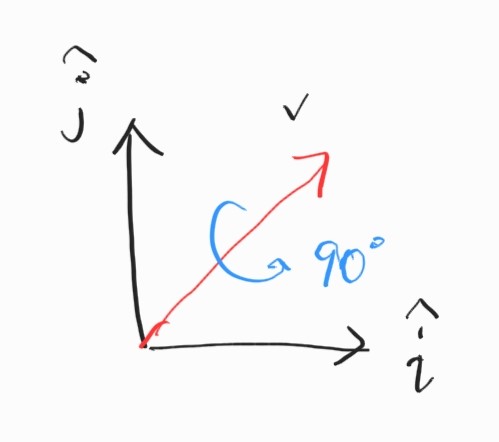
벡터 $\textbf{v}$를 따라 $90^{\circ}$ 회전한 quaternian을 찾아보자.
\[q = \begin{bmatrix} \cos(\frac{90^{\circ}}{2}) \\ v_1 \sin(\frac{90^{\circ}}{2}) \\ v_2 \sin(\frac{90^{\circ}}{2}) \\ v_3 \sin(\frac{90^{\circ}}{2}) \\ \end{bmatrix} = \begin{bmatrix} \frac{1}{\sqrt{2}} \\ \frac{1}{2} \\ \frac{1}{2} \\ 0 \\ \end{bmatrix}\]비슷하게, $(1,0,0)$에 대해 $60^{\circ}$만큼의 회전을 나타내는 quaternion은
\[q = (\cos(\frac{60^{\circ}}{2}),sin(\frac{90^{\circ}}{2})(1,0,0)) = (0.866,0.5,0,0)\]$q$의 conjugate와 inverse는
\[q^{\ast} = q^{-1} = (0.866,-0.5,0,0)\]일반적으로, $x$-, $y$-, $z$-축에 대한 임의의 rotation을 나타내는 quaternion은
Rotation about $x$ : $q = (\cos(\frac{\theta}{2}), \sin(\frac{\theta}{2}), 0, 0)$
Rotation about $y$ : $q = (\cos(\frac{\theta}{2}),0, \sin(\frac{\theta}{2}), 0)$
Rotation about $z$ : $q = (\cos(\frac{\theta}{2}),0, 0, \sin(\frac{\theta}{2}))$
Example 2
점 $\textbf{p} = \begin{bmatrix} 3 & 5 & 2 \end{bmatrix}^T$를 축 $\begin{bmatrix} 1 & 0 & 0 \end{bmatrix}^T$를 기준으로 $60^{\circ}$ 회전한 결과를 구하라.
Using quaternion.
$\square$
Using rotation matrix.
$\square$
Example 3
다음 rotation matrix와 동치인 unit quaternion을 구하라.
\[\textbf{R} = \begin{bmatrix} -\frac{1}{2} & 0 & -\frac{\sqrt{3}}{2} \\ 0 & 1 & 0 \\ \frac{\sqrt{3}}{2} & 0 & -\frac{1}{2} \\ \end{bmatrix}\]Ans.
그러므로 quaternion은
\[q = (q_0, \textbf{q}) = (\frac{1}{2} , 0,-\frac{\sqrt{3}}{2}, 0 )\]$\square$
Robotics Toolbox - Quaternion
UnitQuaternion 함수는 rotation matrix를 unit quaternion으로 바꾸어 준다.
R = rpy2tr(0.1, 0.2, 0.3)
q = UnitQuaternion(R)
q =
0.98335 < 0.034271, 0.10602, 0.14357 >
q.plot()
inv(q)
ans =
0.98335 < -0.034271, -0.10602, -0.14357 >
q * inv(q)
ans =
1 < 0, 0, 0 >
q/q
ans =
1 < 0, 0, 0 >
다시 quaternion을 orthonormal rotation matrix로 만들려면,
q.R
ans =
0.9363 -0.2751 0.2184
0.2896 0.9564 -0.0370
-0.1987 0.0978 0.9752
1.6.2 Quaternion vs Euler Angles
다시 quaternion $q$로부터 만든 rotation matrix $\textbf{R}$는
\[\textbf{R} = \begin{bmatrix} 1-2(q_2^2 + q_3^2) & 2(q_1q_2 - q_0q_3) & 2(q_0q_2 + q_1q_3) \\ 2(q_0q_3 + q_1q_2) & 1-2(q_1^2 + q_3^2) & 2(q_2q_3 - q_0q_1) \\ 2(q_0q_2 + q_1q_3) & 2(q_0q_1 + q_2q_3) & 1-2(q_1^2 + q_2^2) \\ \end{bmatrix}\]$Z-Y-X$ Euler angle의 경우, 각 $\alpha$, $\beta$, $\gamma$는 다음과 같이 결정된다.2
\[\begin{align*} \beta &= \arctan(-r_{31}, \sqrt{r_{11}^2 + r_{21}^2}) \\ \alpha &= \arctan(\frac{r_{21}}{c \beta}, \frac{r_{11}}{c \beta}) \\ \gamma &= \arctan(\frac{r_{32}}{c \beta}, \frac{r_{33}}{c \beta}) \\ \end{align*}\]$ZYX$ Euler angle 역시 quaternion으로 다음과 같이 표현 가능.
\[q(\hat{\textbf{z}}, \alpha) = \begin{bmatrix} \cos(\frac{\alpha}{2}) \\ 0 \\ 0 \\ \sin(\frac{\alpha}{2}) \end{bmatrix} \qquad q(\hat{\textbf{y}}, \beta) = \begin{bmatrix} \cos(\frac{\alpha}{2}) \\ 0 \\ \sin(\frac{\alpha}{2}) \\ 0 \end{bmatrix} \qquad q(\hat{\textbf{z}}, \gamma) = \begin{bmatrix} \cos(\frac{\alpha}{2}) \\ \sin(\frac{\alpha}{2}) \\ 0 \\ 0 \end{bmatrix}\]따라서 $ZYX$ Euler angle에 대한 quaternion 역시 연속된 quaternion들의 곱으로 나타난다.
\[q = q(\hat{\textbf{z}}, \alpha)q(\hat{\textbf{y}}, \beta)q(\hat{\textbf{z}}, \gamma)\]1.6.3 Comparison
| Format | # of parameters | Singularity? | Compounding |
|---|---|---|---|
| Rotation Matrix | 9 | No | Matrix Multiplication |
| Euler angles/rpy | 3 | Yes | Non-trivial |
| Angle + axis | 3(1+2) | No, but problem for zero rotation | Non-trivial |
| Quaternion | 4 | No | Quaternion multiplication |