
1.1 Coordinate Frame
1.1.1 Pose
Point(점)는 수학에서는 추상적 대상이지만, 실제 물체는 무한히 많은 point들로 구성된다. Point와 달리 실제 물체에는 방향도 존재. 만일 물체에 coordinate frame(좌표계)을 부착한다면,
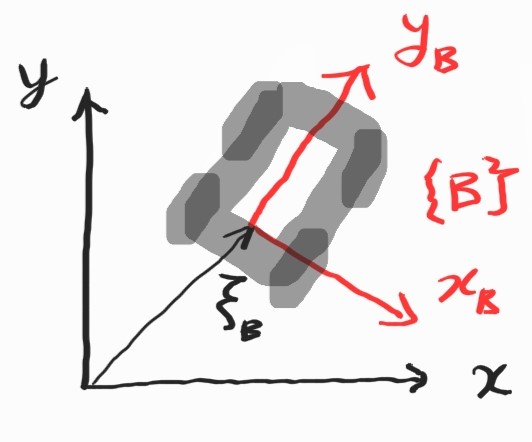
이제 reference coord. frame에 대하여 물체의 좌표계의 position(위치)과 orientation(방향)을 기술할 수 있게 되었다. 즉, constant vector로 나타낼 수 있다.
Position과 orientation을 합쳐서 pose라고 한다.
구분을 위해 objective coord. frame을 $\{B\}$로, 그 축들을 $x_{B}$와 $y_{B}$로 나타내기로 하자.
3-D 세계에서 rigid object의 pose를 완전히 기술하기 위해서는 3차원이 아닌 6차원이 필요하다. 3개는 position을, 3개는 orientation을 기술.
1.1.2 Pose of Coordinate
좌표계의 pose는 기호 $\xi$로 표기.
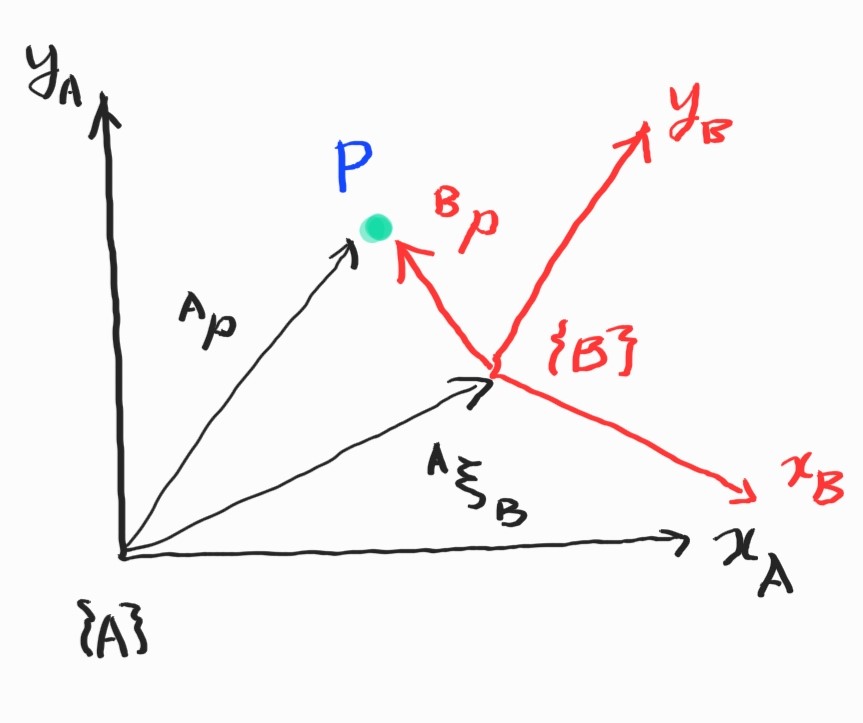
위 그림을 보면, 두 frame $\{A\}$, $\{B\}$와 $\{A\}$에 대한 $\{B\}$의 상대적인 pose를 나타내는 $^{A}\xi_{B}$가 있다.
$^{A}\xi_{B}$는 motion처럼 생각해도 무방. $\{A\}$를 집어들어서 변위와 회전을 적용해 $\{B\}$로 변환시키는 것.
위 첨자가 없을 때는 pose 변화가 world coord. frame $\{O\}$에 대해 일어났다고 가정하자.
점 $\textbf{P}$는 각각의 coord. frame에 따라 벡터 $^{A}\textbf{p}$ 또는 $^{B}\textbf{p}$로 표현될 수 있다. 이들 사이의 관계는
\[{}^{A}\textbf{p} = {}^{A}\xi_{B} \cdot {}^{B}\textbf{p} \tag{ $ 1 $ }\]우변이 바로 $\{A\}$에서 $\{B\}$로 $P$를 움직였음을 의미. 연산자 $\cdot$는 같은 point지만 다른 coord. frame으로 표현되는 벡터로 변환시켰음을 의미
1.1.3 Composing Relative Poses
상대 pose의 특징은 합성이 가능하다는 것.
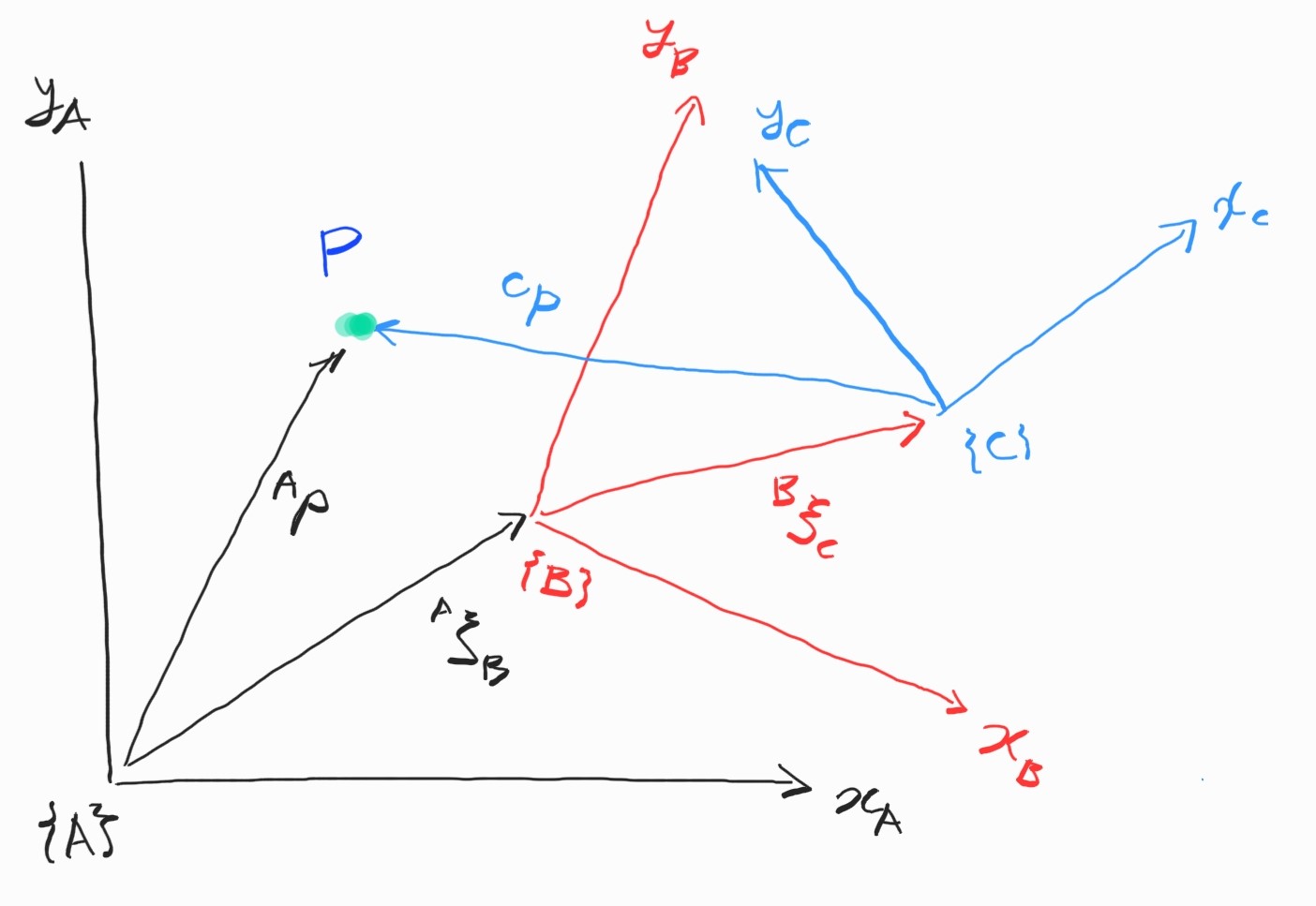
하나의 frame이 다른 frame에 대해 relative pose로 표현된다면, 다음과 같이 연속적으로
\[^{A}\xi_{C} = {}^{A}\xi_{B} \oplus {}^{B}\xi_{C}\]relative pose의 composition을 나타낼 때는 연산자 $\oplus$를 사용한다.
이 경우 point $P$는 다음과 같이 기술된다.
\[^{A}\textbf{p} = ({}^{A}\xi_{B} \oplus {}^{B}\xi_{C}) \cdot {}^{C}\textbf{p}\]조금 대충 정의한 notation들($\xi, \cdot, \oplus$)은 나중에 제대로 수학적 용어로 나타낼 것이다. 일단은 이 정도로.
1.1.4 Some Algebraic Rules
(1) pose는 inverse를 갖는다.
\[\ominus {}^{X}\xi_{Y} = {}^{Y}\xi_{X}\]그림으로 표현하자면 $\{Y\}$에서 $\{X\}$로의 화살표가 될 것이다.
(2) $0$을 zero relative pose라고 하면,
\[\xi \oplus 0 = \xi, \qquad \xi \ominus 0 = \xi \\ \xi \ominus \xi = 0, \qquad \ominus \xi \oplus \xi = 0\](3) Composition은 commutative가 아니다.
\[\xi_{1} \oplus \xi_{2} \not= \xi_{2} \oplus \xi_{1}\]예외는 $\xi_{1} \oplus \xi_{2} =0$일 때만.
1.1.5 그래서 $\xi$가 뭔데 씹덕아
$\xi$는 위 연산들을 만족하는 임의의 수학적 object라고 할 수 있다. 우리가 고려하는 대상이 2-D인지 3-D인지에 따라 달라질 수도 있다. 몇몇은 꽤 친숙하지만1, 기괴하게 생긴 무언가도 있을 수 있다.2