5.2 Sources with Inputs
5.2.1 Ideal Torque Source
이전까지는 초기 각속도를 가지고 천천히 느려지는 damped rotational system을 구성했다. 이번엔 초기값으로 외부 applied torque가 주어지는 경우를 생각해보자.
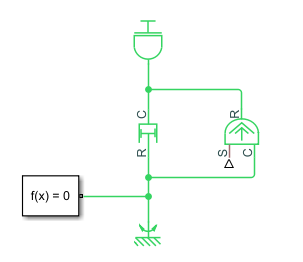
Damper-Inertia 시스템을 만들고 Ideal Torque Source을 부착하자.
Simscape > Foundation Library > Mechanical > Mechanical Sources > Ideal Torque Sources
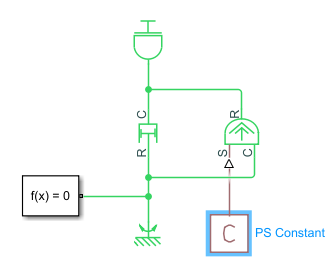
Ideal Torque Source는 R, C, S 포트를 가진다. 각 포트 아이콘으로부터 어떤 타입의 signal을 받아들일 수 있는지 알 수 있다.

이를 모델에 연결하자. 고정된 ground에 대해 토크를 주고 싶으므로, R 포트를 Inertia에, C 포트를 Mechanical Rotational Reference에 연결한다.
S 포트는 physical signal input 포트이다. 이 포트에 연결된 물리적 신호 값은 R과 C 포트 사이에 작용할 토크 값이다.
초기 토크라는 물리적 신호를 주어야 하므로, PS Constant 블록을 연결한다. 값은 $\textrm{10 N·m}$으로 결정한다.
Foundation Library > Physical Signals > Sources > PS Constant