
5.1 Ports
5.1.1 Ports of Sensor Blocks
센서 블록에는 두 종류의 포트가 존재.
-
Domain-specific port
-
Physical signal port

5.1.2 Domain-Specific Ports
Domain-specific ports는 conserving port라고도 불린다. Conserving port에 연결되는 선은 양방향(bidirectional) 에너지 흐름을 표현한다.
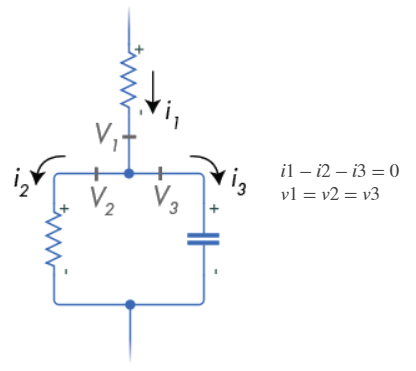
Domain-specific port에 의한 노드는 Kirchhoff’s law를 따른다. 즉,
- Through variable(전류, 각속도)의 합은 모든 가지에서 0.
- Across variable(전압, 토크)의 값은 모든 가지에서 일정.
Conserving port는 같은 domain을 갖는 conserving port하고만 연결될 수 있다. Multidomain system에 대한 건 다음 기회에.
5.1.3 Physical Signal Ports
Physical signal port에 연결되는 선들은 개별적은 블록 변수들을 표현한다. 이들은 simulink 신호를 통해 simulink 블록을 지날 수 있다.
Simscape 센서는 측정값을 physical signal로 내보낸다. 우리도 Physical Signals 라이브러리의 블록들로 신호를 만들고 방정식을 정의할 수 있다.
반대로 physical signal들은 특정 simscape source의 input으로 사용될 수 있다.
예를 들면 Mechanical rotational domain에는 Ideal Torque Source와 Ideal Angular Velocity Source가 존재한다. 토크와 각속도 값은 물리적 신호 input에 의해 제어된다.
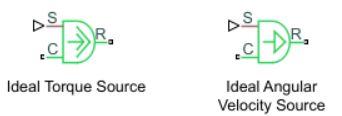
이전에 말했듯, 두 포트는 화살표 모양으로 구분이 가능.