1.3 Motion of Four-bar System
1.3.1 Actuation
Revolute Joint의 Actuation을 이용하자. Motion은 입력값으로부터 제공받고 Torque는 자동적으로 계산하도록 선택한다.
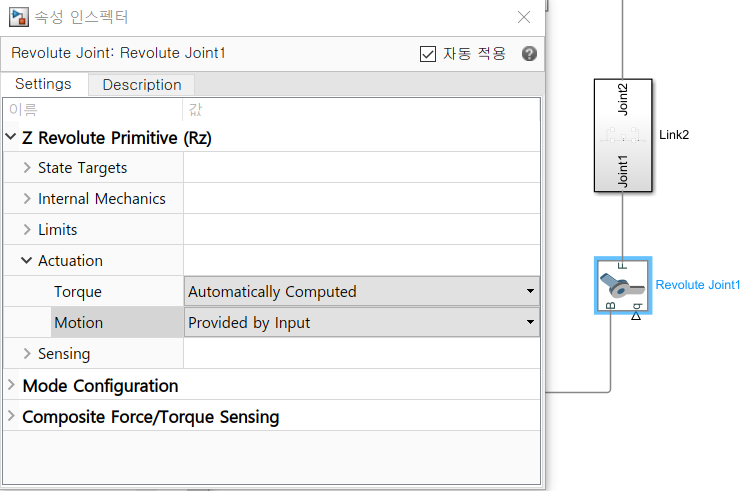
Revolute Joint의 새로운 입력 포트 q가 생겨난다.
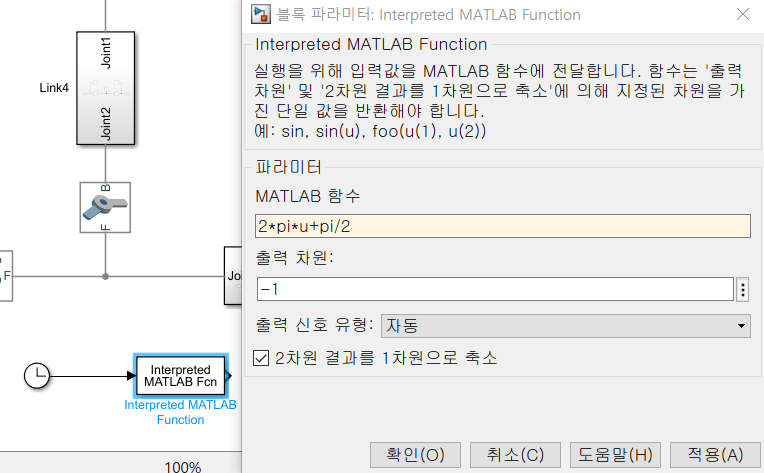
MATLAB function을 이용해 motion을 생성하고 Revolute Joint에 집어넣을 것이다.
Simulink > User-Defined Functions > Interpreted MATLAB Function
시간에 따라 입력을 받을 것이므로,
Simulink > Sources > Clock
Input $u$를 이용해, 시간당 $2 \pi u$만큼 이동할 수 있도록 함수를 정의한다. 초기값은 $\frac{\pi}{2}$, 즉 $90^{\circ}$에서 시작하도록 한다.
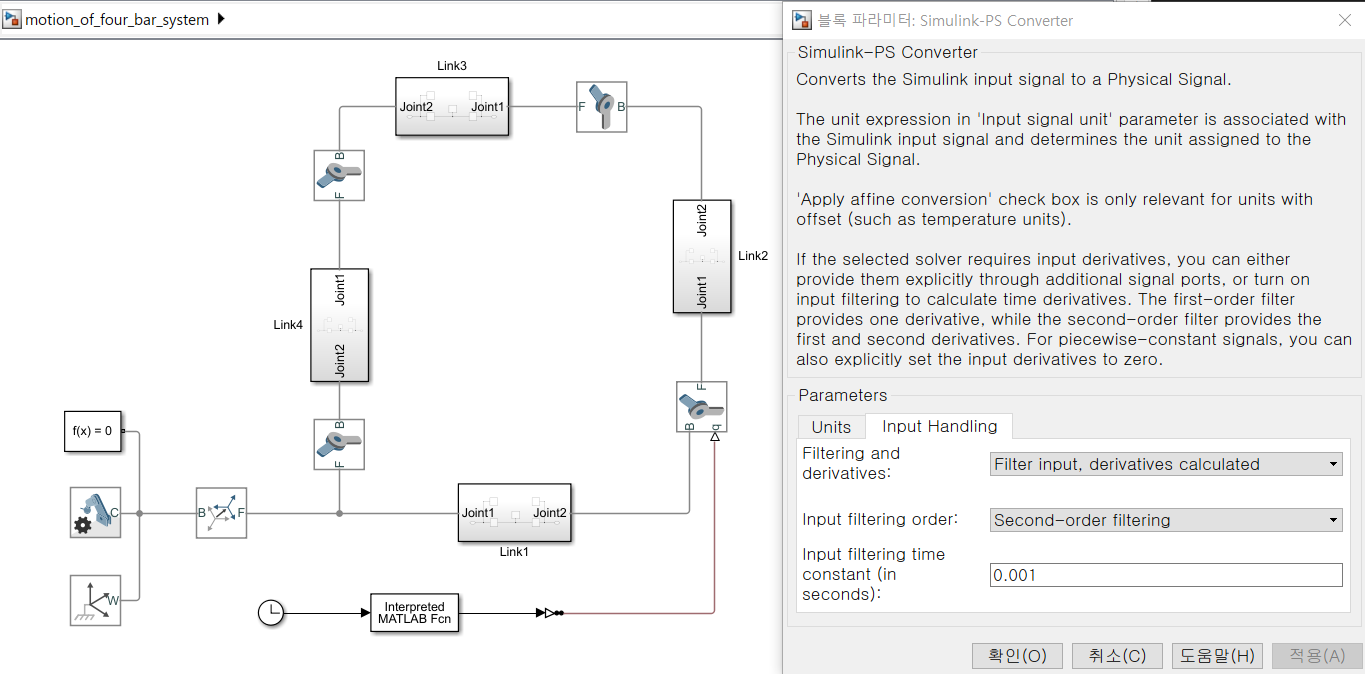
그런데, 위에서 정의한 함수는 Simulink 데이터이다. 이를 Physical Signal로 수정해야 하므로, input에 집어넣기 전에 Simulink-PS Converter 블록을 연결한다. 단위는 $\textrm{rad}$, 필터링은 Filter input, Second order filtering을 이용한다.
이제 준비가 되었다. Four-bar system는 position input을 받는다. Simulation time을 1초로 지정하면 한 바퀴 돌아가는 것을 확인할 수 있다. 초기 각도 역시 $90^{\circ}$로 지정되어 있다.